IEC 및 ISO 인증 획득 (이미지=삼성전자)
IEC 및 ISO 인증 획득 (이미지=삼성전자)
삼성전자는 24.7.17일, 자체 개발한 ‘이동형 로봇용 안전 소프트웨어 프레임워크(Safety Software Framework)’가 DNV로부터 IEC 61508과 ISO 13849 인증을 동시에 획득했다고 밝혔다.
이동형 로봇의 고장이나 오작동으로 사람이 입을 수 있는 피해를 없애는 안전 소프트웨어에 대해 IEC 61508의 안전 무결성 수준 SIL 2(100~1,000년 사이에 장애 발생 가능)와 ISO 13849의 성능수준 PLd(안정성 높음)를 획득한 것이다.
안전 소프트웨어 프레임워크는 기존과 달리 별도의 하드웨어 안전 제어기 없이도 로봇을 안전하게 제어할 수 있는 기술이다.
삼성전자 최고은 팀장은 “이번 국제 규격 인증 취득으로 삼성 로봇 소프트웨어 프레임워크가 탑재된 플랫폼에 대해 안전성과 신뢰성을 확보했음을 입증했다”고 말했다.
△ DNV(Det Norske Veritas)
ㅣ 노르웨이에 있는 국제 인증 기관이다.
△ SIL(안전 무결성 수준, Safety Integrity Level)
ㅣ SIL은 IEC 61508에 정의되어 있으며, 우리나라의 관련 표준은 KS C IEC 61508이다.
ㅣ SIL은 장애 발생 확률에 따라 4단계로 구분한다. SIL이 높을수록 안정성이 더 높다.
ㅣ SIL1은 1~100년, SIL2는 100~1,000년, SIL3는 1,000년~10,000년, SIL4는 10,000~100,000년 사이에 장애가 발생할 확률이다.
 SIL 안전수준 (이미지=현대로템)
SIL 안전수준 (이미지=현대로템)
ㅣ 제품이나 시스템이 SIL4 인증을 취득했다는 것은, 한마디로 ‘고장이 날 가능성이 없다’는 것이 검증되었음을 뜻한다.
ㅣ 산업 분야에 따라 안전성 요구 사항과 수준이 서로 다르기 때문에, 산업별 다른 규격이 적용되고 있다.
IEC 61508 : 기본 규격
EN 50126/EN 50128/EN 50129 : 철도(Railway)
ISO 17894 : 선박(Marine)
IEC 61513 : 원자력(Nuclear)
ISO 26262 : 자동차(Automotive)
DO-178/DO-254 : 항공우주(Aerospace)
△ IEC 61508 시리즈
ㅣ IEC(국제전기기술위원회, International Electrotechnical Commission)에서 정한 ‘기능 안전’ 표준이다.
ㅣ 모든 산업 분야에서 하드웨어와 소프트웨어를 결합한 제품들이 제조/사용됨에 따라 안전성을 확보하기 위한 국제표준이다.
ㅣ IEC 61508-1, IEC 61508-2, IEC 61508-3의 요구사항(requirements)은 의무 사항으로, 반드시 수행되어야 하는 것을 뜻한다.
ㅣ IEC 61508 : 전기/전자/프로그램 가능한 전자장치 안전 관련 시스템의 기능 안정성(Functional safety of electrical/electronic/programmable electronic safety-related systems)
IEC 61508-0 : 기능 안정성, IEC 61508(Functional safety and IEC 61508)
IEC 61508-1 : 일반 요구사항(General requirements)
IEC 61508-2 : 전기/전자/프로그램 가능한 전자장치 안전 관련 시스템의 요구사항(Requirements for electrical/electronic/programmable electronic safety-related systems)
IEC 61508-3 : 소프트웨어 요구사항(Software requirements)
IEC 61508-4 : 정의 및 약어(Definitions and abbreviations)
IEC 61508-5 : 안전 무결성 수준을 결정하는 방법의 예(Examples of methods for the determination of safety integrity levels)
IEC 61508-6 : IEC 61508-2 및 IEC 61508-3의 적용 지침(Guidelines on the application of IEC 61508-2 and IEC 61508-3)
IEC 61508-7 : 기법 및 수단의 개요(Overview of techniques and measures)
△ ISO 13849 시리즈
ㅣ ISO(국제표준화기구, International Organization for Standardization)에서 정한 ‘시스템 안전’ 표준이다.
ㅣ ISO 13849 : 기계 장치 제어시스템의 안전 관련 부품(Safety of machinery - Safety-related parts of control systems)
ISO 13849-1 : 설계의 일반원칙(General principles for design)으로, 2023년에 개정되었다.
ISO 13849-2 : 검증(Validation)
ㅣ 성능요구수준(required performance level, PLr) : 부상의 심각성(Severity of Injury), 위험 노출 빈도(Frequency and/or Exposure to Hazard), 위험 회피 가능성(Possibility of Avoiding Hazard or Limiting Harm)을 평가하여 결정되는 수준이다. 위험성이 클수록 제어시스템에 대한 성능요구수준은 높아진다. PLa(위험성 낮음), PLb, PLc, PLd, PLe(위험성 매우 높음) 5단계다.
ㅣ 성능수준 (performance level, PL) : 제어시스템의 안전 관련 부품의 안정성 수준이다.
ㅣ 성능수준(PL)은 성능요구수준(PLr) 보다 높거나 같아야 한다.
ㅣ (예) 부상의 심각성이 높고(S2), 위험 노출 빈도가 낮고(F1), 위험 회피 가능성이 낮으면(P2) 성능요구수준은(PLr)은 PLd가 된다. 이를 만족하기 위한 성능수준(PL)은 PLd(안정성 높음) 또는 PLe(안정성 매우 높음)가 되어야 한다.
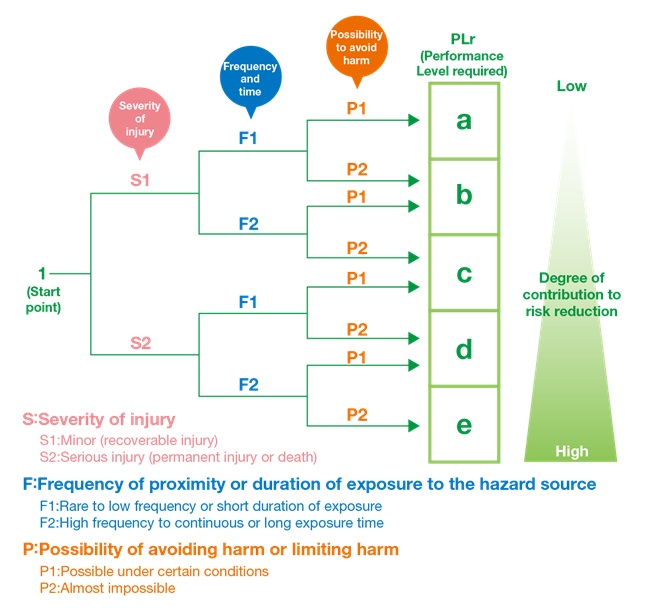 성능요구수준 vs 성능수준 (이미지=IDEC)
성능요구수준 vs 성능수준 (이미지=IDEC)
하드웨어 관련, 안전 제어기((Safety Controller)에 대해서는 22.6월 LG전자가 DNV로부터 ISO13849 인증을 획득한 바 있다. 이 안전 제어기는 로봇에 탑재된 센서에서 보내주는 신호를 실시간으로 모니터링함으로써 위험을 감지해 로봇이 안전하게 감속 및 정지할 수 있도록 한다.


 한국 주식을 언제든/어디서든/믿고/편리하게 살 수 있게 시간/공간/불신/불편 장벽 해소
한국 주식을 언제든/어디서든/믿고/편리하게 살 수 있게 시간/공간/불신/불편 장벽 해소
 현대자동차그룹 '2026 CES 선언'의 의미
현대자동차그룹 '2026 CES 선언'의 의미
 21세기 천상열차분야지도, 스피어엑스 우주 지도
21세기 천상열차분야지도, 스피어엑스 우주 지도
 한일 정상회담 및 주요 성과 관련 대국민보고
한일 정상회담 및 주요 성과 관련 대국민보고
 혐오하지 않을 용기
혐오하지 않을 용기
 목록
목록