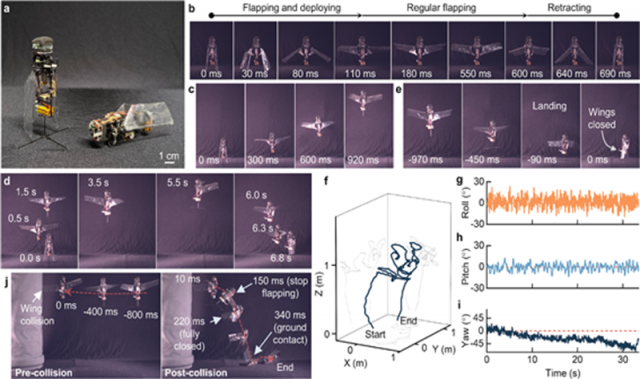
 장수풍뎅이 모방 로봇 ‘KUBeetle’의 수직 상승, 정지, 착륙 등의 비행 과정 연구 도식
장수풍뎅이 모방 로봇 ‘KUBeetle’의 수직 상승, 정지, 착륙 등의 비행 과정 연구 도식
건국대학교 박훈철 교수가 장수풍뎅이의 비행 원리를 모방한 초소형 비행 로봇 ‘KUBeetle’을 개발했다.
이 논문은 24.7.31일 ‘네이처(Nature)’ 온라인판에 게재됐다. 주저자/교신저자는 박훈철 교수의 제자인 판 호앙 부(Hoang-Vu Phan) 스위스 로잔 공대 박사후연구원(Postdoc)이고, 공동 저자는 건국대 박훈철 교수와 로잔 공대 다리오 플로리아노(Dario Floreano) 교수다.
박훈철 교수와 판(Phan) 박사는 20년에 장수풍뎅이 모방 로봇의 비행 중 충돌 실험 결과를 사이언스에 발표한 바 있다. 이번 후속 연구에서는 장수풍뎅이의 비행 중 날개의 펼침과 접힘 과정/원리를 규명한 후, 이를 공학적으로 모방해 비행 로봇 ‘KUBeetle’에 적용했다.
지금까지 장수풍뎅이가 뒷날개를 완전히 펼치는 원리에 대해서는 논란이 있었다. 연구팀은 장수풍뎅이 날개의 각도에 주목했다. 지상에서는 뒷날개를 접어서 앞날개 아래에 넣어 보관하는 장수풍뎅이는 비행 직전에 앞날개를 완전히 펼치는 반면, 뒷날개는 바깥 부분이 접힌 채로 노출된다. 이어서 접힌 뒷날개는 몇 차례의 날갯짓으로 뒷날개를 완전히 펼쳐서 비행한다. 이러한 과정을 날갯짓 각도가 증가할 때 변화하는 날개 펼침각의 각도로 설명했다.
이는 날개의 접힘 과정에서도 검증됐다. 비행하던 장수풍뎅이는 아주 짧은 시간에 날갯짓 각도와 속도를 줄이면서 하강한다. 이때 날개에 발생하는 원심력이 줄어 날개의 상승각과 날개 펼침각이 감소하면서 지상으로 내려온다.
뒷날개를 떼어서 날갯짓 장치에 부착해 구동할 경우에도 몇 차례의 날갯짓으로 접힌 뒷날개를 완전히 펼칠 수 있었다. 이로부터 장수풍뎅이가 특정 근육을 움직여 날개를 펼치는 것이 아니라, 날갯짓으로 발생하는 원심력으로 뒷날개를 완전히 펼친다는 것을 입증했다.
날개가 접힐 때 한쪽의 앞날개가 없는 경우, 앞날개가 있는 쪽은 앞날개가 접히면서 뒷날개도 따라 접히지만, 앞날개가 없는 쪽 뒷날개는 접히지 않는 것을 확인했다. 특히 앞날개 없이 뒷날개를 접기 위해서 다리를 이용해 뒷날개를 접으려 시도하는 장면도 포착했다.
이처럼 장수풍뎅이는 특정 근육의 작동 없이 날갯짓으로 발생하는 원심력으로 뒷날개를 수동적으로 펼치고, 날갯짓을 멈추면 뒷날개는 수동적으로 접히는 위치로 내려온 후 앞날개와 연동해 완전히 접힌다.
연구팀은 이러한 장수풍뎅이 날개의 펼침-접힘 원리를 모방해 ‘KUBeetle’에 지지대와 날개 막, 경첩 관절, 탄성 힘줄로 이뤄진 날개를 부착했다. 몸통과 날개는 힌지로 연결해 날개가 접히게 하고, 적절한 탄성을 갖는 와이어(wire)로 날개 뿌리와 힌지를 연결했다. 그 결과 아래쪽으로 접힌 날개는 초기 날갯짓의 원심력으로 상승해 일정한 날갯짓 평면을 이루며 로봇의 무게인 18g보다 큰 양력을 발생시켜 로봇이 비행할 수 있음을 증명했다.
또 ‘KUBeetle’은 날개가 외부 물체와 충돌하는 경우, 날갯짓을 멈춰 날개를 접으면서 착륙해 날개의 파손도 방지한다.
장수풍뎅이 모방 로봇 ‘KUBeetle’은 원심력과 탄성력을 이용해 접혔던 날개를 펼치고, 펼쳐진 날개의 날갯짓으로 양력을 발생해 비행하기 때문에 로봇을 이동하는데 비용이 많이 발생하는 극지, 우주 탐사 등에 활용 가능할 것으로 기대된다.
박 교수는 “대기 밀도가 낮은 지구와 우주상의 극한 환경에서도 로봇이 비행할 수 있도록 후속 연구를 진행하고 있다”고 밝혔다.


 한국 주식을 언제든/어디서든/믿고/편리하게 살 수 있게 시간/공간/불신/불편 장벽 해소
한국 주식을 언제든/어디서든/믿고/편리하게 살 수 있게 시간/공간/불신/불편 장벽 해소
 현대자동차그룹 '2026 CES 선언'의 의미
현대자동차그룹 '2026 CES 선언'의 의미
 21세기 천상열차분야지도, 스피어엑스 우주 지도
21세기 천상열차분야지도, 스피어엑스 우주 지도
 한일 정상회담 및 주요 성과 관련 대국민보고
한일 정상회담 및 주요 성과 관련 대국민보고
 혐오하지 않을 용기
혐오하지 않을 용기
 목록
목록